|
| 1 | +# 涂鸦T5AI版本 Otto机器人制作教程指南 |
| 2 | + |
| 3 | +## 项目概述 |
| 4 | + |
| 5 | +Otto Robot 是一个开源的人形机器人平台,支持多种功能扩展。本指南将帮助您快速搭建和配置属于自己的 Otto 机器人,并通过涂鸦智能APP实现远程控制。 |
| 6 | + |
| 7 | +## 演示视频 |
| 8 | + |
| 9 | +**点击观看效果**:[Otto 演示视频](https://t.tuya.com/AY1D3VxAQs) |
| 10 | + |
| 11 | +## 一、材料清单 |
| 12 | + |
| 13 | +以下是制作 Otto Robot 所需的硬件材料: |
| 14 | + |
| 15 | +### 1. 外壳 |
| 16 | + |
| 17 | +- **型号**: Otto Robot 3D打印机体外壳 |
| 18 | +- **购买链接**:[闲鱼] |
| 19 | + |
| 20 | +### 2. 舵机 |
| 21 | + |
| 22 | +- **型号**:SG90 180度舵机 |
| 23 | +- **购买渠道**:淘宝 |
| 24 | + |
| 25 | +### 3. 显示屏 |
| 26 | + |
| 27 | +- **型号**:ST7789 |
| 28 | +- **购买渠道**:淘宝 |
| 29 | + |
| 30 | +### 4. 开发板 |
| 31 | + |
| 32 | +- **型号**:T5 mini 开发板 |
| 33 | +- **购买方式**:淘宝 |
| 34 | + |
| 35 | +## 二、硬件接线图 |
| 36 | + |
| 37 | +| 硬件设备 | 外设 | T5引脚 | 引脚功能 | |
| 38 | +| -------- | ---- | ------ | ------------- | |
| 39 | +| 屏幕 | SCL | P14 | SPI0时钟 | |
| 40 | +| | CS | P13 | SPI0片选 | |
| 41 | +| | SDA | P16 | SPI0数据 | |
| 42 | +| | RST | P19 | 屏幕复位 | |
| 43 | +| | DC | P17 | 数据/命令选择 | |
| 44 | +| | BLK | 可不接 | 屏幕背光 | |
| 45 | +| 舵机 | PWM0 | P18 | 左腿舵机 | |
| 46 | +| | PWM1 | P24 | 右腿舵机 | |
| 47 | +| | PWM2 | P9 | 左脚舵机 | |
| 48 | +| | PWM3 | P34 | 右脚舵机 | |
| 49 | + |
| 50 | +## 三、软件设计 |
| 51 | + |
| 52 | +### 1. 代码下载 |
| 53 | + |
| 54 | +- **主仓库**:https://github.com/tuya/TuyaOpen |
| 55 | + |
| 56 | +### 2. 开发文档 |
| 57 | + |
| 58 | +- **文档地址**:[Tuya 开发文档](https://www.tuyaopen.io/en/master/)(先仔细阅读文档哦) |
| 59 | + |
| 60 | +### 3. 配置修改 |
| 61 | + |
| 62 | +- **PID修改**:在文件 `apps/tuya.ai/your_otto_robot/include/tuya_config.h` 中 |
| 63 | + |
| 64 | + 将 PID 修改为 `**pnax3fya1ctl5pst**` |
| 65 | + |
| 66 | +- **UUID获取**:访问 [Tuya Open 仓库](https://github.com/tuya/TuyaOpen/tree/master) 点击 右上角"Star" 后进群获取 UUID |
| 67 | +- **配置T5 mini开发板引脚:**在apps/tuya.ai/your_otto_robot/ 使用命令**:**tos menuconfig 按下图操作选择 |
| 68 | + |
| 69 | + |
| 70 | + |
| 71 | + |
| 72 | + |
| 73 | +- **选择st7789屏幕**:在apps/tuya.ai/your_otto_robot/ 使用命令:tos menuconfig 按下图操作选择 |
| 74 | + |
| 75 | +按照下图的0-5操作后保存 |
| 76 | + |
| 77 | +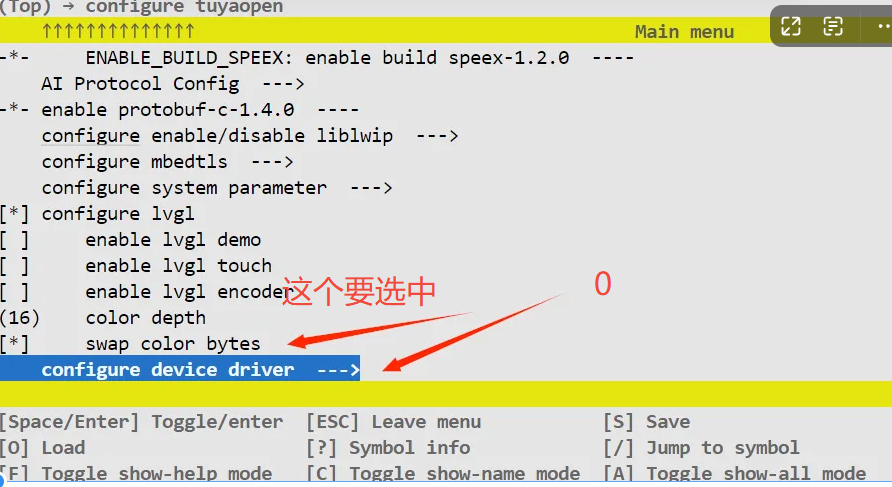 |
| 78 | + |
| 79 | +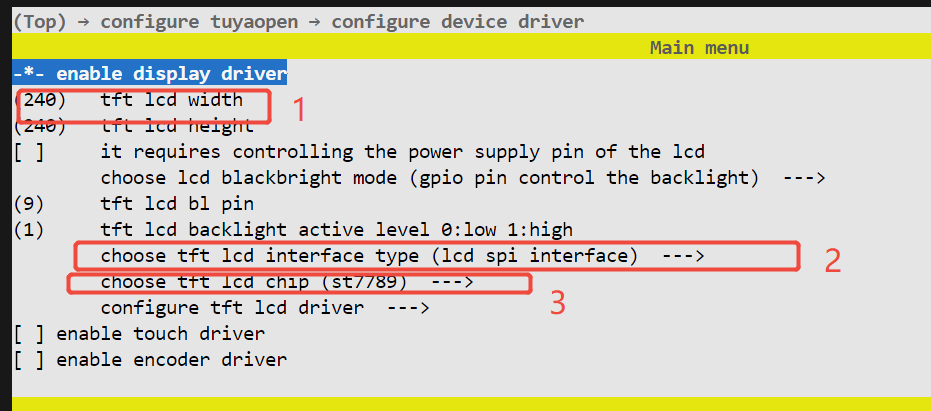 |
| 80 | + |
| 81 | +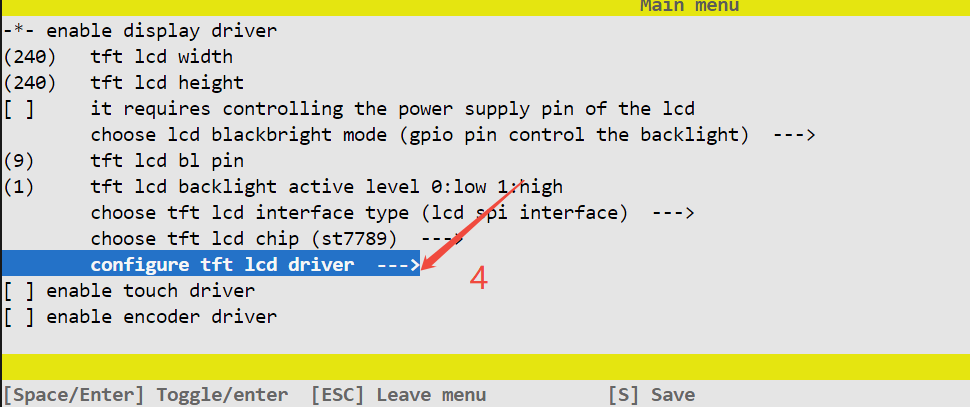 |
| 82 | + |
| 83 | +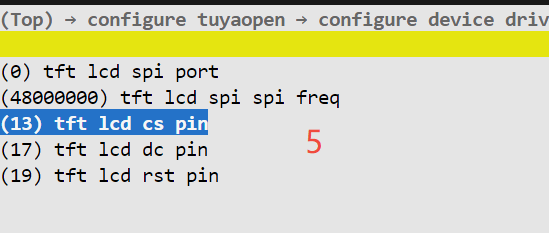 |
| 84 | + |
| 85 | +### 以上配置完成后保存:再tos build哦 |
| 86 | +编译完成后才会下拉platform/T5AI/tuyaos/tuyaos_adapter/src/driver/tkl_pwm.c文件 |
| 87 | +记得修改tpwm_chan_t ty_to_bk_pwm(TUYA_PWM_NUM_E ch_id)接口里面的PWM的映射表: |
| 88 | +``` |
| 89 | +pwm_chan_t ty_to_bk_pwm(TUYA_PWM_NUM_E ch_id) |
| 90 | +{ |
| 91 | + pwm_chan_t pwm = PWM_ID_MAX; |
| 92 | + switch(ch_id) { |
| 93 | + case TUYA_PWM_NUM_0: |
| 94 | + pwm = PWM_ID_0; |
| 95 | + break; |
| 96 | + case TUYA_PWM_NUM_1: |
| 97 | + pwm = PWM_ID_4; |
| 98 | + break; |
| 99 | + case TUYA_PWM_NUM_2: |
| 100 | + pwm = PWM_ID_3;//改这行 |
| 101 | + break; |
| 102 | + case TUYA_PWM_NUM_3: |
| 103 | + pwm = PWM_ID_8; |
| 104 | + break; |
| 105 | + case TUYA_PWM_NUM_4: |
| 106 | + pwm = PWM_ID_10; |
| 107 | + break; |
| 108 | + default: |
| 109 | + break; |
| 110 | + } |
| 111 | +
|
| 112 | + return pwm; |
| 113 | +} |
| 114 | +``` |
| 115 | + |
| 116 | +记得再次编译:tos build |
| 117 | + |
| 118 | +### 4. 社区支持 |
| 119 | + |
| 120 | +- **企业微信群** |
| 121 | + |
| 122 | + |
| 123 | + |
| 124 | +- **QQ群**:[加入涂鸦AI开发群](https://github.com/tuya/TuyaOpen/tree/master/apps/tuya.ai)(点star可以领取授权码) |
| 125 | + |
| 126 | + |
| 127 | + |
| 128 | +## 四、固件烧录指南 |
| 129 | + |
| 130 | +### 1. 烧录准备(参考第二章) |
| 131 | + |
| 132 | +1. 下载最新版本的固件 `.bin` 文件 |
| 133 | +2. 下载烧录工具或在 Linux 环境下使用 `tos` 命令 |
| 134 | +3. 使用 Type-C 数据线连接 T5 Mini 开发板 |
| 135 | + |
| 136 | +### 2. 烧录步骤 |
| 137 | + |
| 138 | +1. 打开烧录工具 |
| 139 | +2. 选择正确的 COM 端口 |
| 140 | +3. 设置芯片类型为 T5 |
| 141 | +4. 烧录地址设置为 `0x0` |
| 142 | +5. 选择下载的固件文件 |
| 143 | +6. 点击 "Start" 开始烧录 |
| 144 | + |
| 145 | +## 五、控制效果确认 |
| 146 | + |
| 147 | +### 1. AI运动控制 |
| 148 | + |
| 149 | +1. 下载涂鸦智能APP |
| 150 | +2. 在APP右上角添加子设备,选择 "机器人" |
| 151 | +3. 进入控制界面,即可通过APP控制机器人实现: |
| 152 | + |
| 153 | +- 左右移动 |
| 154 | +- 前后移动 |
| 155 | + |
| 156 | +4. 使用语音控制Otto机器人前后左右移动(唤醒词:"你好,涂鸦"等) |
| 157 | + |
| 158 | +### 2. AI聊天 |
| 159 | + |
| 160 | +1. 使用语音唤醒聊天(唤醒词:"你好,涂鸦"等) |
| 161 | + |
| 162 | +### 3. 功能清单 |
| 163 | + |
| 164 | +- 支持基本行走动作 |
| 165 | +- 支持语音指令控制 |
| 166 | +- 屏幕显示状态信息 |
| 167 | +- 支持视频识别(未来规划) |
| 168 | + |
| 169 | +## 六、资源支持 |
| 170 | + |
| 171 | +- **技术交流**:加入涂鸦AI开发微信&QQ群获取技术支持 |
| 172 | +- **社区分享**:欢迎在 GitHub 或涂鸦开发者社区分享您的项目心得 |
| 173 | + 祝您成功打造属于自己的智能Otto机器人! |
| 174 | + |
| 175 | +## 七、致谢 |
| 176 | + |
| 177 | +本项目感谢以下开源作者的支持: |
| 178 | + |
| 179 | +1. [txp666] |
| 180 | + |
| 181 | + |
| 182 | + |
| 183 | +本项目感谢以下开源项目的支持: |
| 184 | + |
| 185 | +1. OttoDIYLib |
| 186 | + |
| 187 | + |
| 188 | + |
| 189 | + |
| 190 | +本项目感谢以下开源社区的支持: |
| 191 | + |
| 192 | +1. JLCEDA |
0 commit comments