Optimize for front wheel inertia instead of front wheel radius. #7
Conversation
…o physically realizable wheels.
…us of disc 0.0254 m.
|
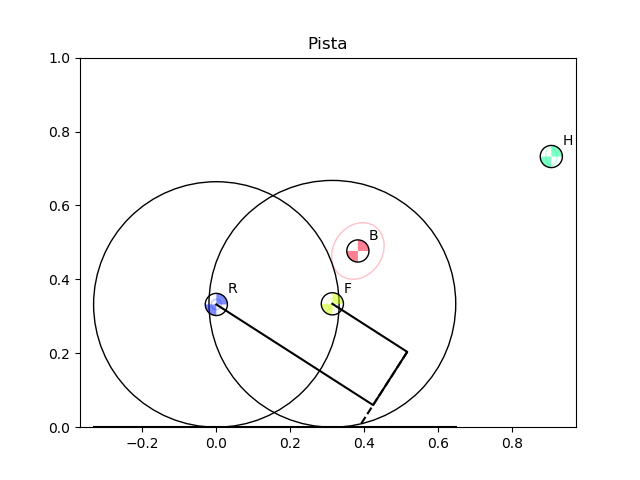
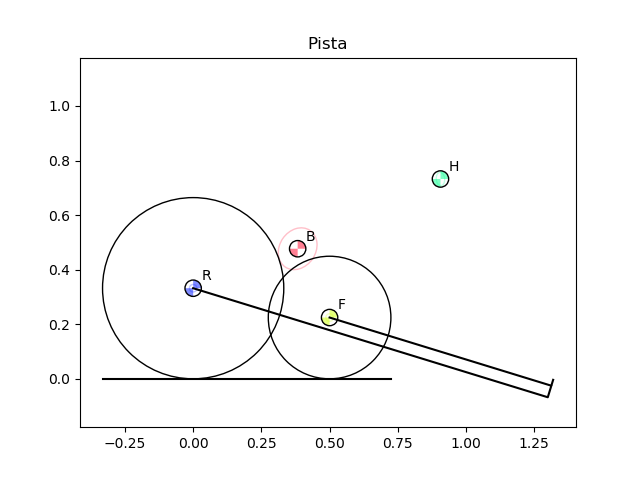
Here is a result for the Pista at 6 m/s: Here is the picture:
|
|
I think we can enforce the total center of mass of the bicycle + rider to be in front of the front wheel contact point. The lower bound of the wheel base should be able to be set such that that is true. |
Means we'd have to assume a minimal w. |
|
But since mB is so large, maybe we can ignore the location of the wheel and just use: This would be the center of mass location of the whole system if the front wheel were location as far back as the rear wheel. |
|
DOH, I already have something like that in the code. |
|
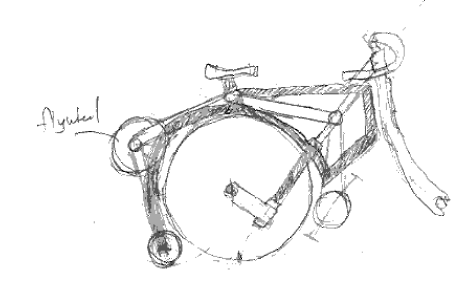
Here is an example of how one might be able to build the above bicycle:
|
|
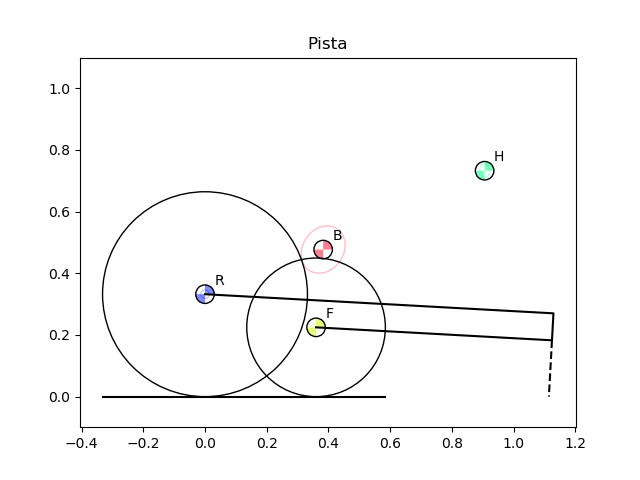
Here is a result for the PIista at 3 m/s (with a starting HQM at about 8). And look at this beauty!
|
|
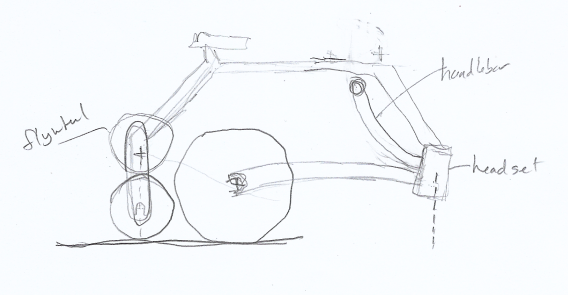
Here is a sketch of a possibility: |
|
Here is the result of the Pista @ 3 m/s with a min wheelbase of 0.5 m. Here is the geometry:
|
No description provided.