Fuzzy logic and PID controllers for multiple robot behaviors
Closed loop PID and fuzzy logic controllers for right edge following and obstacle avoidance using laser sesnor. ROS along with python was used for controller development. Individual classes was developed and they are tested in Gazebo simulator.










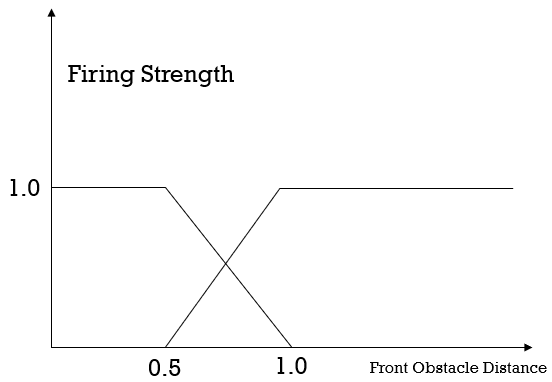
Individual behaviours was merged using fuzzy coordination.